enebular developer Meetup Vol.6でお伝えした、enebular editorをデスクトップから動作させてTelloを離着陸させてみます。
今回の仕組み
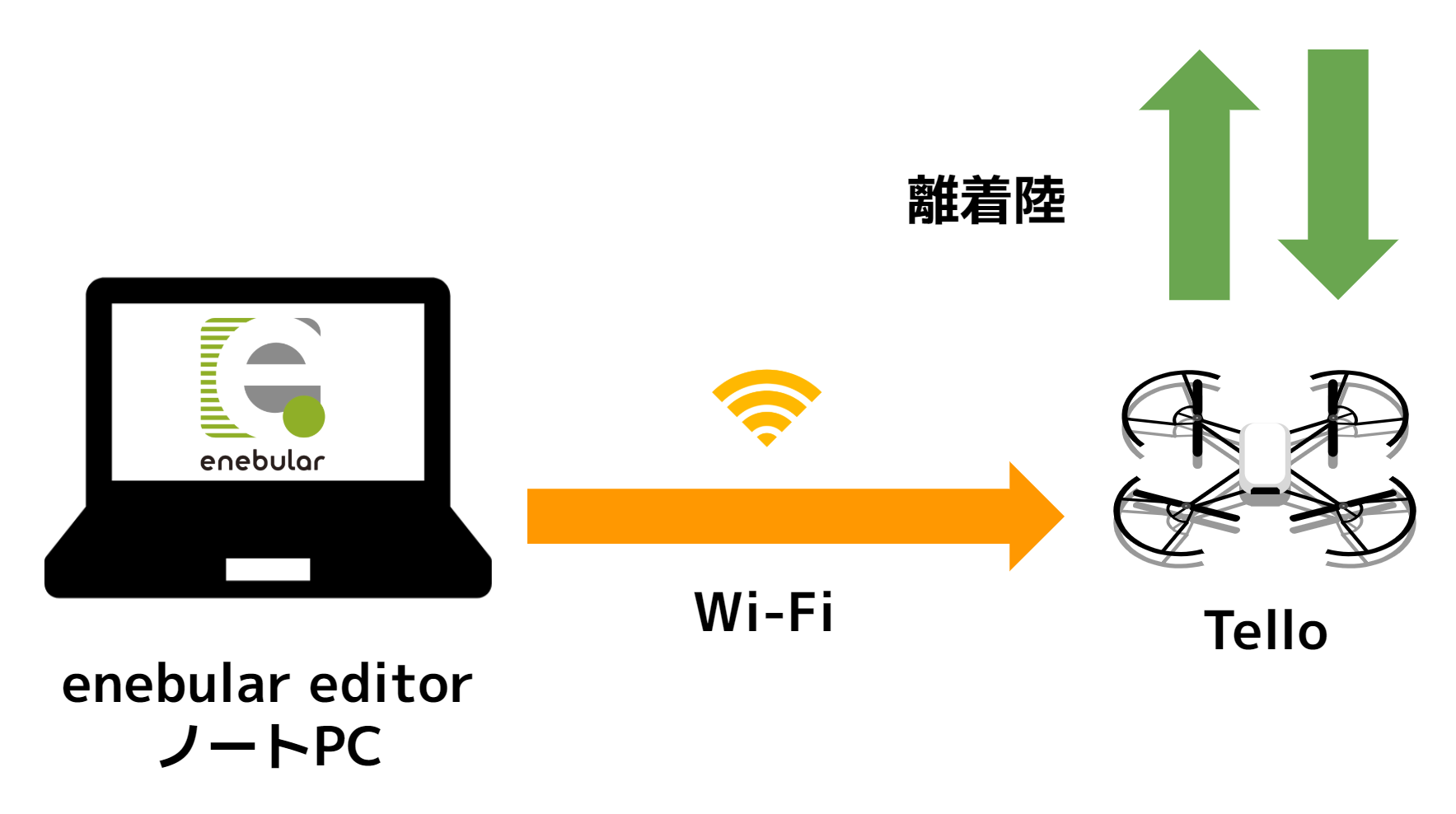
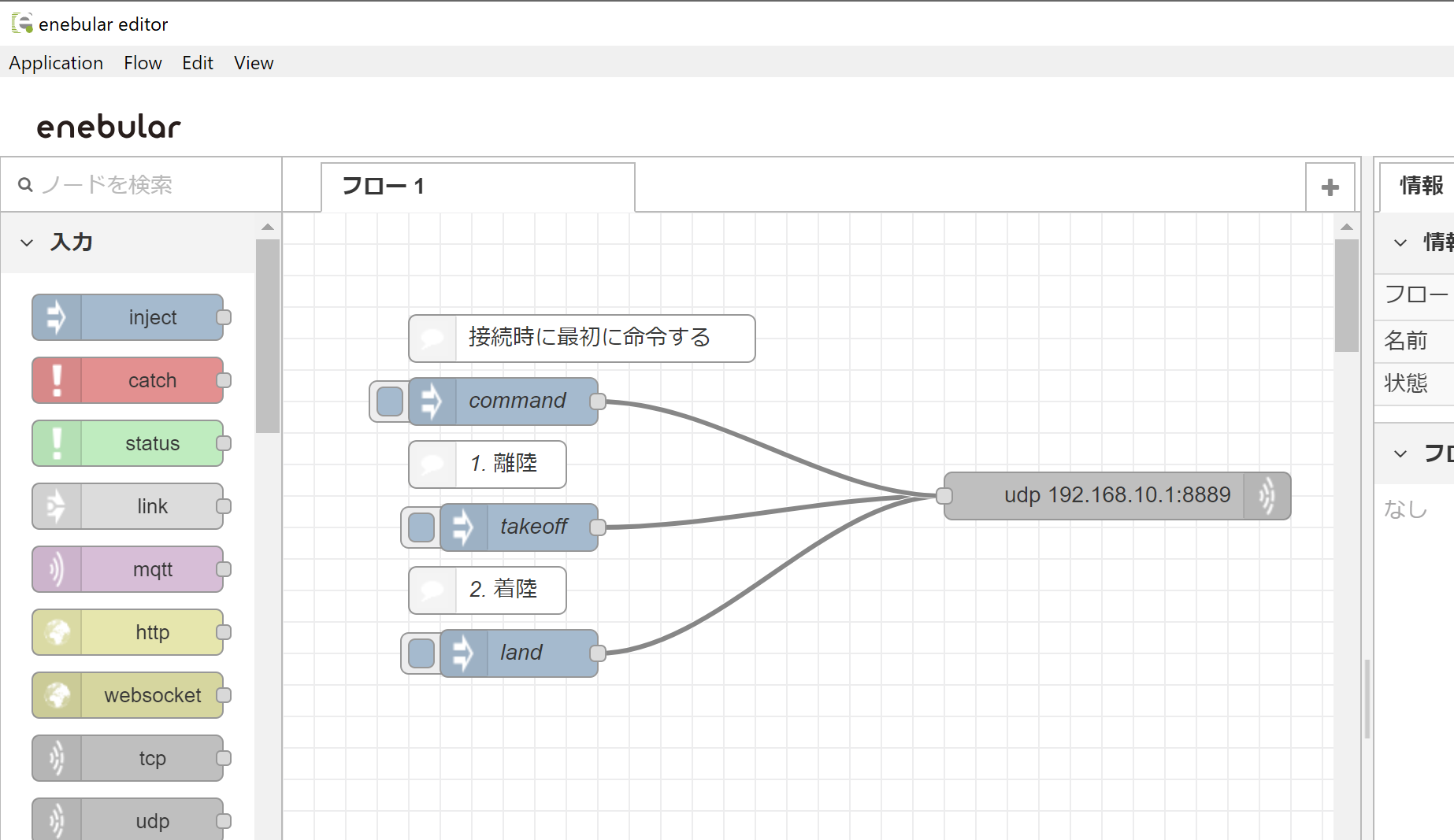
TelloはWi-Fiで接続してUDPプロトコルで操作できるのですが、このようにenebular editorからUDPノードで命令を飛ばして操作することしてみます!
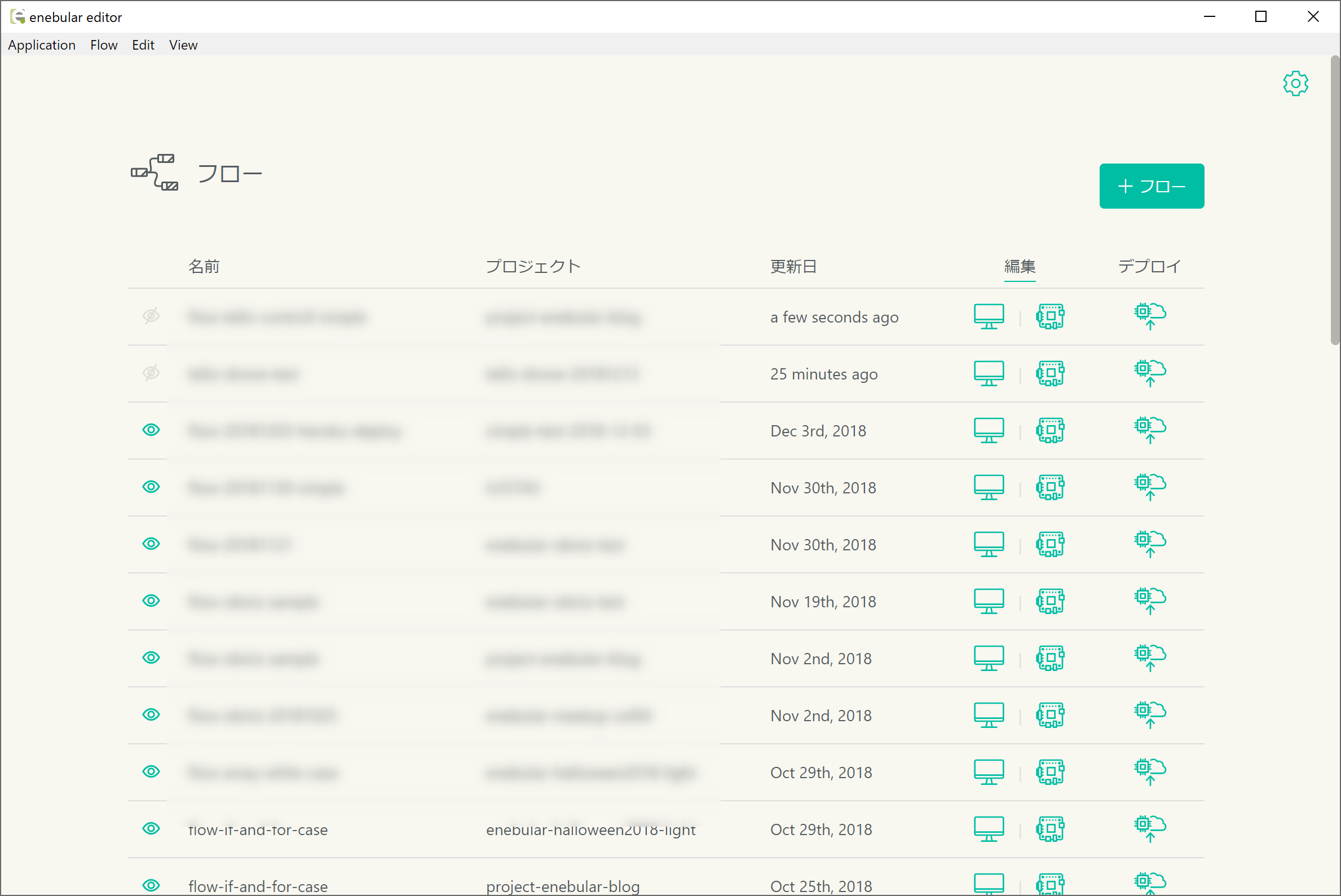
enebular editorの起動
まず、enebular editorの起動です。
フローを取り込む
- Node-REDとトイドローンTelloを連携するメモ – 1ft-seabass.jp.MEMO
- トイドローン Tello をビジュアルプログラミングツール Node-REDで制御してみよう 第2回 離着陸編 | flexy(フレキシー)
どちらも私の書いた記事ですが、こちらを参考に今回はフローを公開しておきました!
Discover Flow
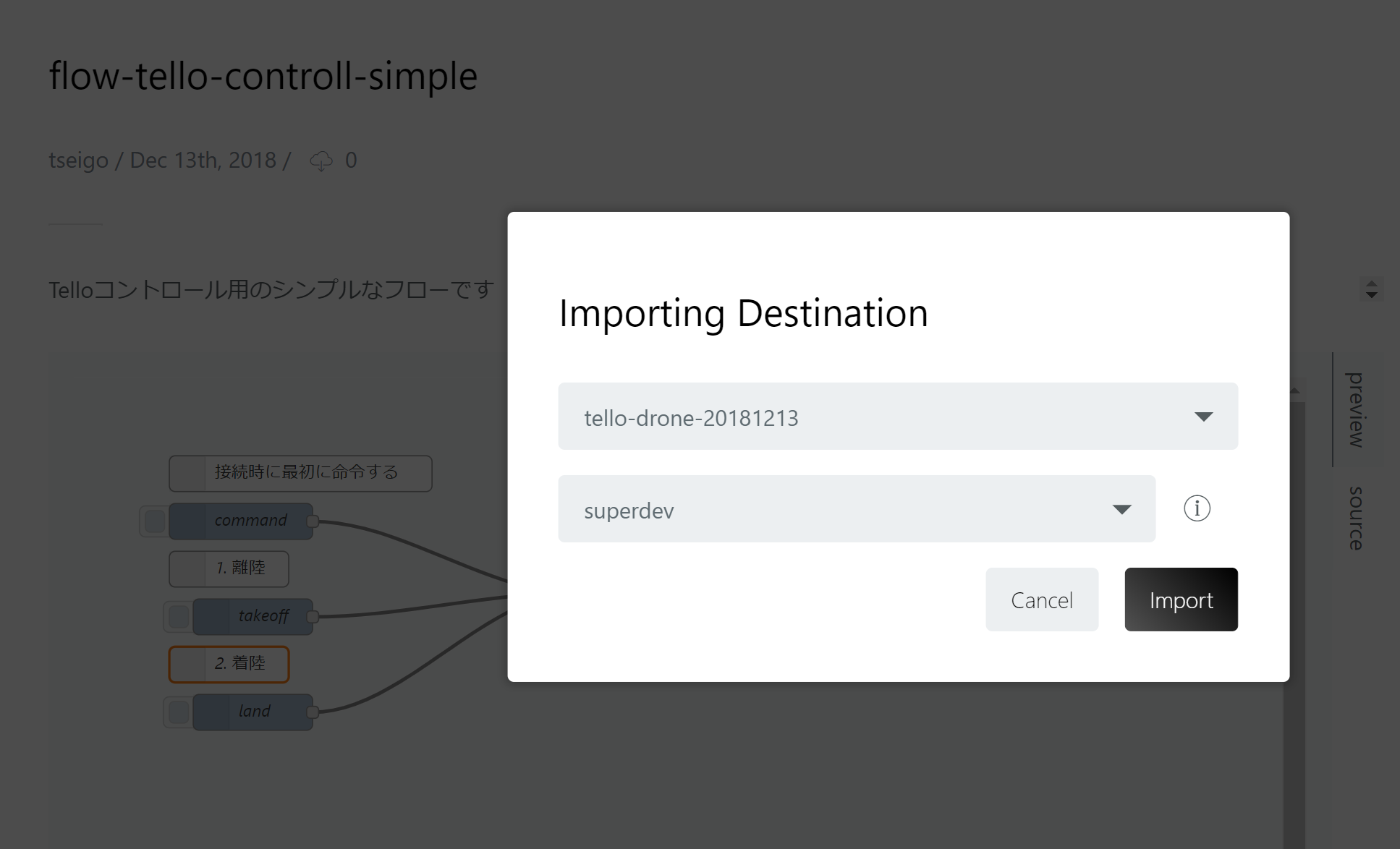
Discover Flowを取り込むためにサイトに移動します。
こちらから取り込みます。
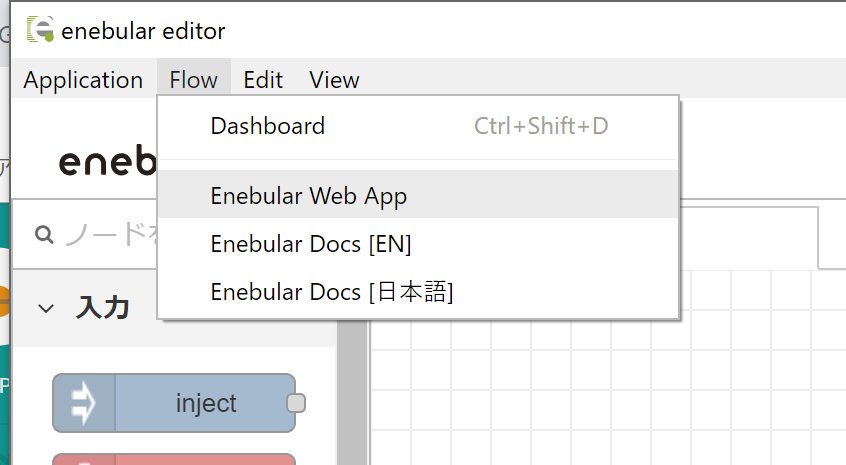
enebular editor をリロード
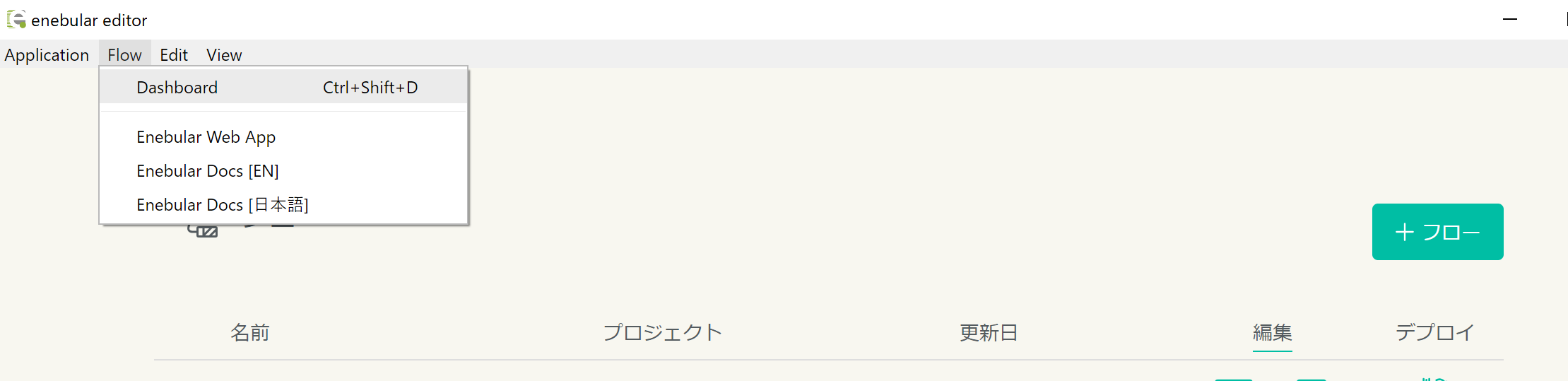
この操作でリロードします。
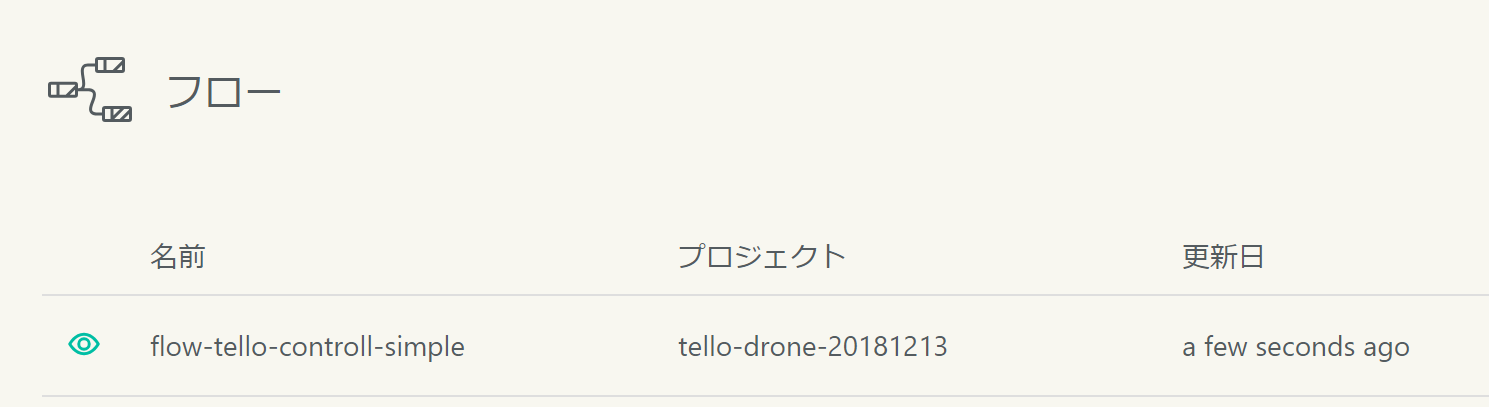
来ました!
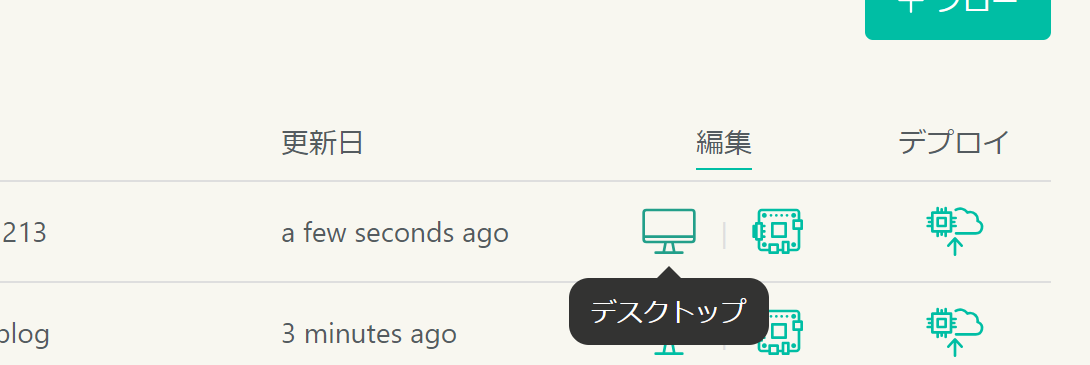
起動します!
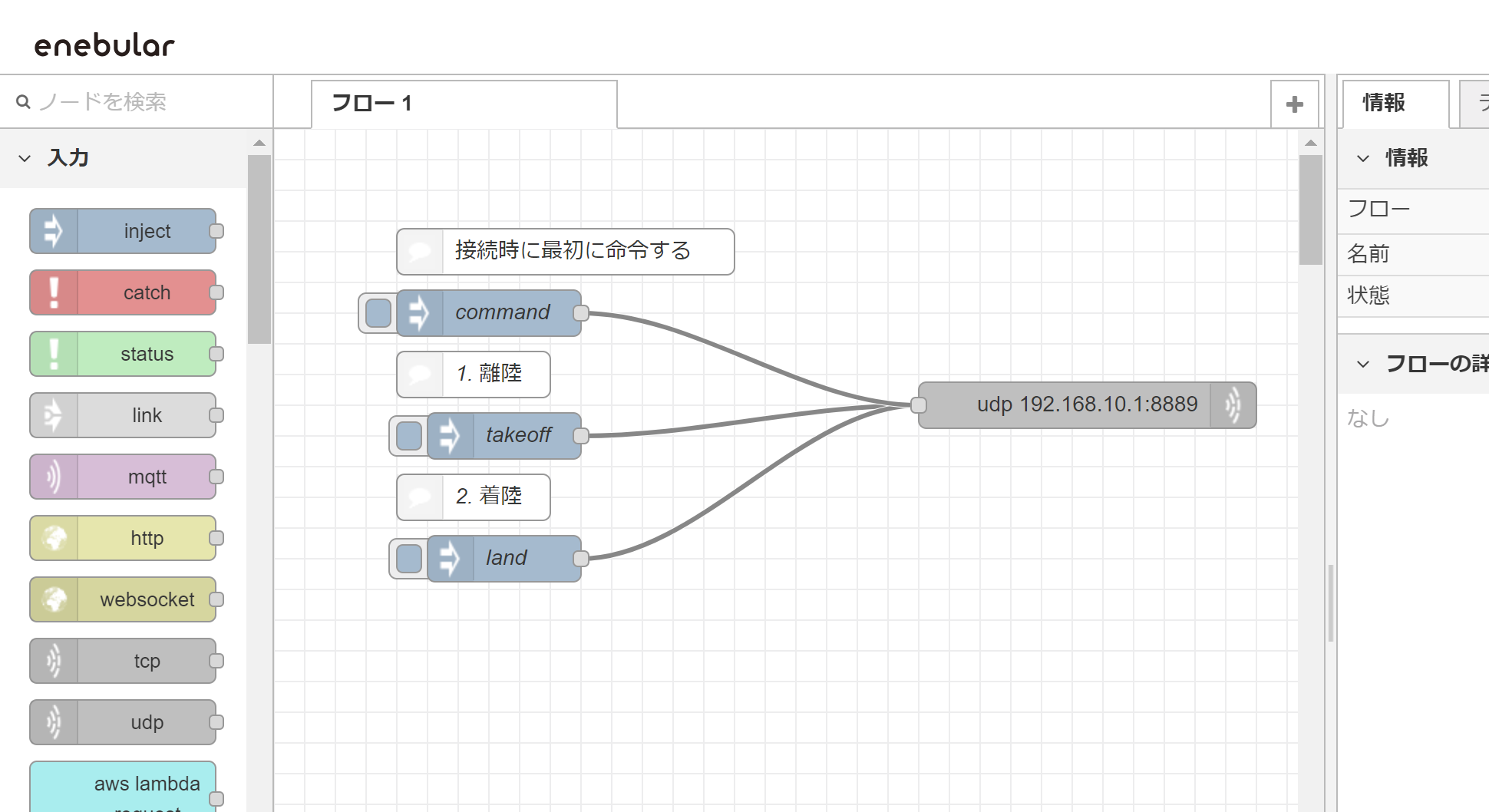
無事読み込まれています。
動かしてみます
- トイドローン Tello をビジュアルプログラミングツール Node-REDで制御してみよう 第1回 準備編 | flexy(フレキシー)
- トイドローン Tello をビジュアルプログラミングツール Node-REDで制御してみよう 第2回 離着陸編 | flexy(フレキシー)
こちらを参考に接続してみます。

TelloのWi-Fiをつないで動かします。
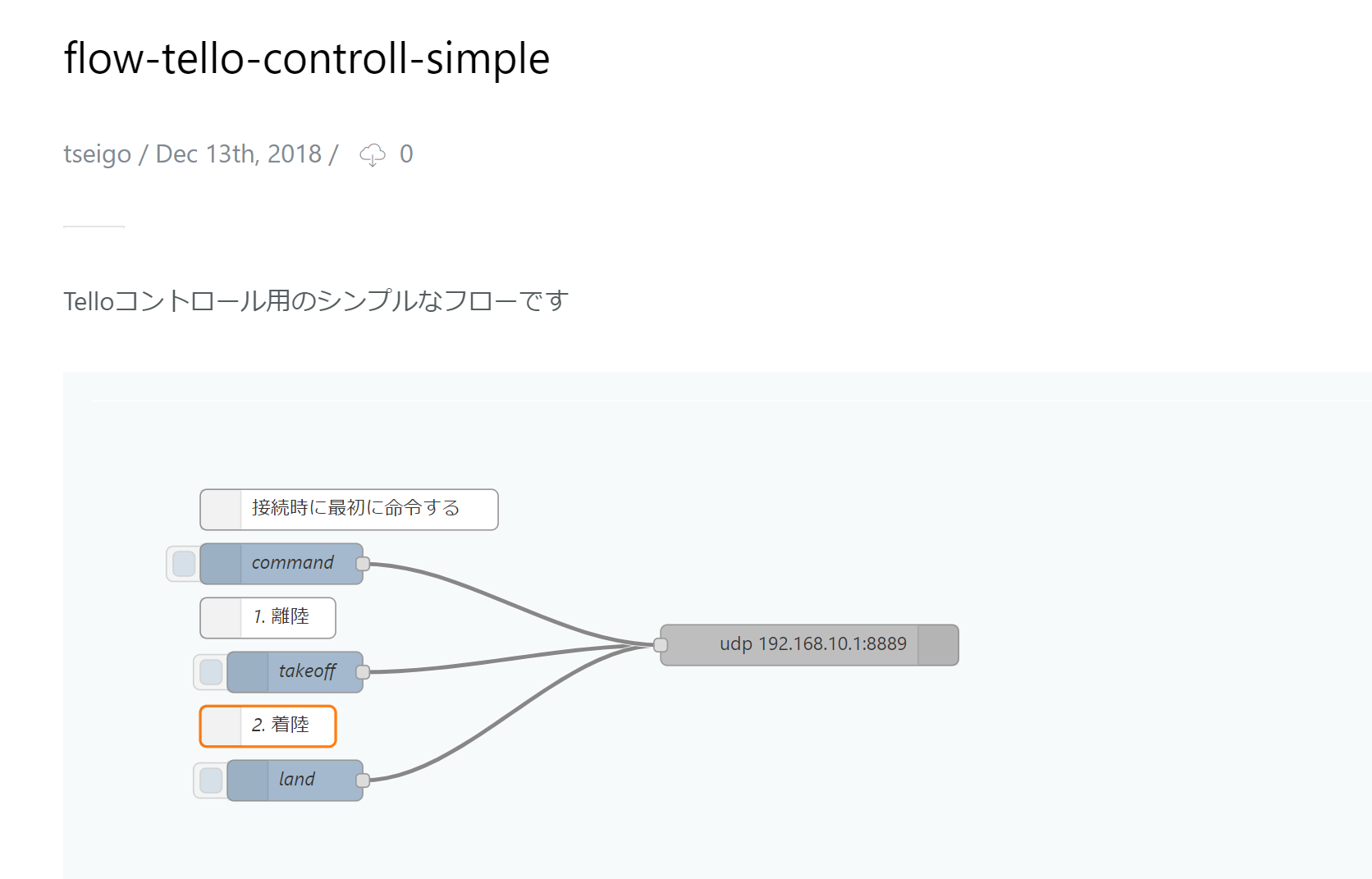
enebular editorで先ほどのフローを準備。
commandを押すと、Telloのランプが緑に光り、takeoffのinjectノードを動かすと離陸するはずです!

離陸しました!
そして、着陸するときは、landを押します。
このように、こうやってデスクトップでのローカルのデバイス操作でも力を発揮する enebular editor 面白いですね!Raspberry Pi にこのフロー伝えればTelloの操縦プログラムをいろいろ変えれたり楽しそうです!
空までアクセスできる enebular 、使うフィールドが広がってきています!


