KeiganMotor
株式会社Keiganさんが開発している簡単にロボットが作れるモーターです。
Node-REDにも対応しているそうで、早速enebularから使ってみました。
出典:https://keigan-motor.com/
動作の様子
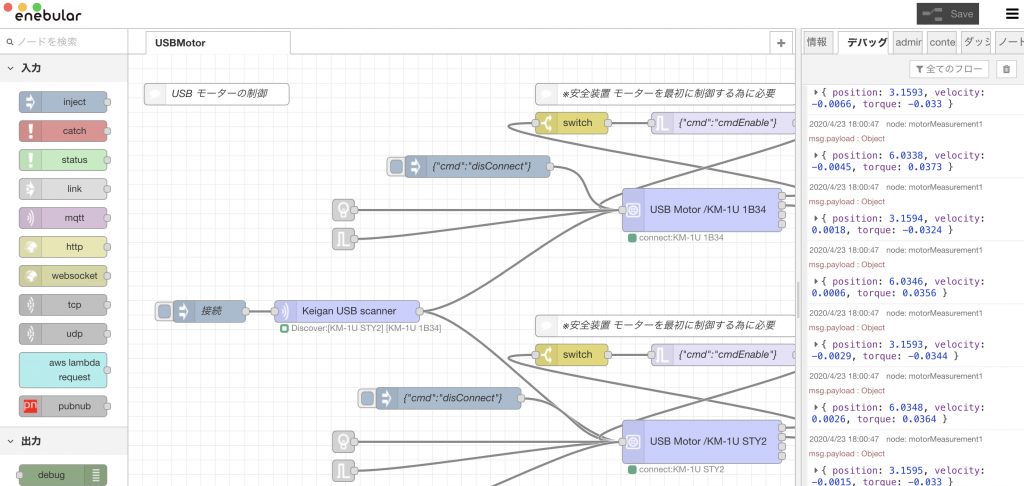
カメラプラットフォームキットで2台のモーターを使ってカメラをコントロールしてみました。
enebular editor上で操作しています。右下のカメラの動作の様子をご覧ください。
重たい一眼レフカメラを載せてもキビキビ動くのがいいですね!
セットアップのポイント
実際やってみて、いくつか注意点があったのでお知らせしておきます。
KeiganPiのセットアップ
- Keigan Motorを動かすためのRasbianのイメージKeiganPiが提供されています。ドキュメントの通りに16GBのmicro SDカードにイメージを焼けばOKです。
- まずは、keigan motorの接続と動作を1台ずつ確認しましょう。
- USBケーブルがしょぼいと動きませんので、もし動かない場合は品質の良いケーブルで試してみましょう。
- USBケーブルで複数台接続するときはUSBハブを介してつなぐ必要があります。
enebular agentのインストール
- keiganPiのNode-REDを止めておきます。シェルスクリプトが提供されています。
- enebular agentは、KeiganPiにインストールします。ローカルPCからラズパイを直接編集したいので、developer modeでインストールします。
- enebular agentが起動すると、enebularのデバイスリストで閲覧できるようになります。
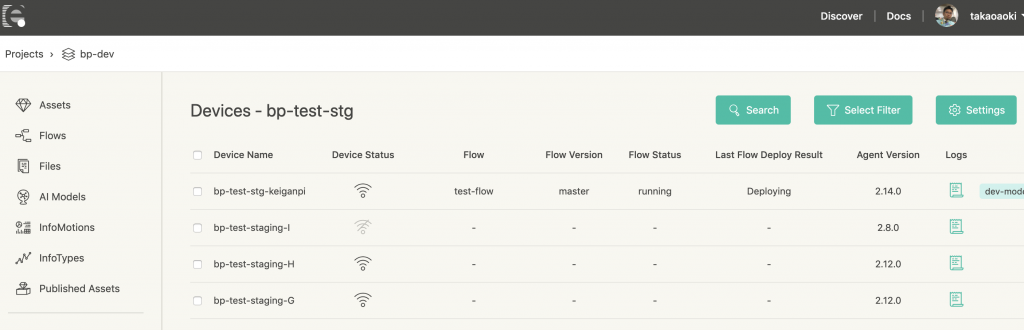
フローの編集
- ノードがデバイスに依存するのでweb edtitorではインストールできません。enebular editorでリモートモードで編集します。
- 現在、npmには2種類のノードがあるのですが、enebularにインストールできたノードは、node-red-contrib-keiganmotorでした。
- keiganpiのチュートリアルで使用しているノードは高機能なのですが、現在のenebular editorやWeb Flow Editorではインストールできませんでした。
まとめ
Node-REDで簡単にモーターが扱えると可能性が広がりますね!
今回作ったフローはDiscoverにあげていますので、ぜひ参考にしてみてください。
次回はグループデプロイで複数のkeiganpiに対してフローをデプロイしてみたいと思っています。


